
PeiLingX
物理学等 2 个话题下的优秀答主
本文是深度科普系列《从线性代数到量子力学》第26课。
了解本系列及本专栏其他文章,请收藏目录:
0) 开篇语
我们在第23课末尾看到,自旋似乎和相对论有着一些微妙的天然联系。
但在上节课对于相对论性的克莱因−高登方程(后文依旧简称“K-G方程”)的构造过程和结果中,我们看到,它仍然没有给出自旋信息(而且还有负能态和负概率的问题……)。
不过话说回来,我们其实到目前为止,都还没有看过,一个包含了自旋信息的波函数和能量本征方程应该是什么样的。
所以,这节课里,我们要首先来聊聊自旋信息应该如何描述,然后看看以及如何融入波函数和能量本征方程当中去(为了简单起见,我们仍然以薛定谔方程为例)。
本课内容会比较抽象,但它们这些将成为我们下节课讨论的重要铺垫,而且,在不久的将来,我们还会通过它们窥见自旋背后那个令人拍案惊奇的空间性质和对称性,所以请同学们一定跟上节奏。
1) 自旋的“量子三件套”
关于自旋的经典图像,我们在第4课已经讨论过:我们可以直接将自旋想象一个带电小球的自转(虽然它并没有真的在转),它有角动量,同时会产生“环形电流”的效果、从而产生磁矩,并且与磁场发生相互作用。
这些经典图像可以帮助我们在脑中建立物理直观,但也就仅此而已,我们不再需要过多谈论它,而应该将更多注意力放在自旋的量子特性上面。
具体说来,我们是要找出自旋的“量子三件套”:本征值、本征态、算符,然后将它们糅合到波函数以及薛定谔方程中。
同学们还记得吗,我们在第4、5课介绍自旋时提到过一些性质:
当我们要测量粒子在某个方向上的自旋时,可能会得到测量方向上一正一负两个本征态。
假设测量方向为z方向,我们可以将两个本征态分别记为|z+⟩,|z−⟩
而根据我们对自旋的经典类比,可以知道,这两个本征态就对应了两个大小相等但符号相反的角动量,它们的值为±ℏ2(可以直观想象为电子的“逆时针自转”和“顺时针自转”,虽然并没有真实的转动产生),于是相应的本征值关系就是:
{ˆSz|z+⟩=ℏ2|z+⟩ˆSz|z−⟩=−ℏ2|z−⟩(式26.1)
考虑到两个本征态正交归一,因此我们不妨选择两个最简单的分量形式来描述它们:
|z+⟩=(1,0)T, |z−⟩=(0,1)T(式26.2)
这其实就意味着我们选取了z方向自旋表象。因为这两个基底刚好组成一个单位矩阵,所以两个z方向自旋本征态基底就是坐标基底本身。而我们在第12课知道,如果选取了某个力学量F的本征态作为基底本身,就意味着我们选取了F表象,于是我们这组基底对应的就是z方向自旋表象。
接下来,我们来构造z方向自旋的算符。
线性代数课告诉我们,已知某个矩阵的特征值和全部特征向量(假设矩阵可相似对角化)时,那么我们可以通过简单的相似变换将原来的矩阵还原出来:
A=[α1α2⋯αn][λ10⋯00λ2⋯0⋮⋮⋱⋮00⋯λn][α1α2⋯αn]−1(式26.3)
其中α1,α2,⋯,αn和λ1,λ2,⋯,λn分别是矩阵A的完备特征向量组和相应的特征值序列。
于是z方向自旋算符就是:
ˆSz=[|z+⟩|z−⟩][ℏ200−ℏ2][|z+⟩|z−⟩]−1=[1001][ℏ200−ℏ2][1001]=ℏ2[100−1](式26.4)
这样,我们就构造出了z方向自旋的“量子三件套”。
现在我们来构造另外两个方向的“三件套”。
由于空间各个方向都没有特殊性,因此首先可以肯定的是,我们在任意方向上测量自旋,都会得到相同的本征值±ℏ2,所以我们只需要搞定剩下的两样东西:本征态和算符的具体形式。
我们先来看x方向,根据S-G实验的结果,我们知道,当粒子在z方向具有确定的自旋、比如处于本征态|z+⟩时,如果测量它在x方向的自旋值,我们会有相同的机会得到|x+⟩,|x−⟩两个本征态,这就意味着,|z+⟩在|x+⟩,|x−⟩上的“投影长度”是相等的。
如果在某个平面上画出它们的“几何关系”,那么一个很容易猜到的情形就是这样:
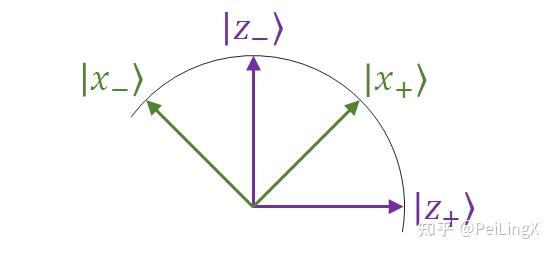
于是,我们可以通过这组几何关系求出|x+⟩,|x−⟩的分量形式:
{|x+⟩=1√2|z+⟩+1√2|z−⟩=(1√2,1√2)T|x−⟩=−1√2|z+⟩+1√2|z−⟩=(−1√2,1√2)T(式26.5)
然后,我们可以求出x方向的自旋算符:
ˆSx=[|x+⟩|x−⟩][ℏ200−ℏ2][|x+⟩|x−⟩]−1=[1√2−1√21√21√2][ℏ200−ℏ2][1√21√2−1√21√2]=ℏ2[0110](式26.6)
然后我们用同样的思路来构造y方向的本征态……
但是,我们立马会发现,平面上似乎没有可用的基底了,因为我们再也找不到能同时和x,z的本征态都成45度角的基底。

不过我们不用绝望,当实数空间不够用的时候,我们可以考虑拿复数来凑,毕竟量子力学里冒出来个复数也不是什么新鲜事儿了。
比如我们在第二个分量上加上一个虚数单位i,就能绝处逢生,又找出一对相互正交的态矢量,作为自旋y在z自旋表象下的本征态:
{|y+⟩=1√2|z+⟩+1√2i|z−⟩=(1√2,1√2i)T|y−⟩=−1√2|z+⟩+1√2i|z−⟩=(−1√2,1√2i)T(式26.7)
(它们在z自旋本征态上的“投影”的模长也是相等的,自然也符合实验事实)
而自旋y相应的算符就是:
ˆSy=[|y+⟩|y−⟩][ℏ200−ℏ2][|y+⟩|y−⟩]−1=[1√2−1√21√2i1√2i][ℏ200−ℏ2][1√2−1√2i−1√2−1√2i]=ℏ2[0−ii0](式26.8)
这样,我们就得到了z自旋表象下,三个方向上的自旋算符和本征态:
{ˆSx=ℏ2[0110]|x+⟩=[1√21√2]|x−⟩=[−1√21√2]ˆSy=ℏ2[0−ii0]|y+⟩=[1√2i√2]|y−⟩=[−1√2i√2]ˆSz=ℏ2[100−1]|z+⟩=[10]|z−⟩=[01](式26.9)
其中,三个自旋算符对应的矩阵(不包含ℏ2因子)被称为泡利矩阵。
(没错,就是那个泡利,那个当初打死也不接受“自旋”概念、最后却喊着“真香”写下了自旋算符矩阵的泡利)
通过这三个特殊方向上的自旋算符,我们还能构造任意方向上的自旋算符,它就是三个算符构成的三维角动量矢量和该方向的单位向量n=(nx,ny,nz)T做内积:
ˆSn=n⋅ˆS=nxˆSx+nyˆSy+nzˆSz=nxℏ2[0110]+nyℏ2[0−ii0]+nzℏ2[100−1]=ℏ2[nznx−inynx+iny−nz](式26.10)
而如果我们知道了n的方向角为θ,φ,那么自旋算符还可以表示为:
ˆSn=ℏ2[cosθcosφsinθ−isinφsinθcosφsinθ+isinφsinθ−cosθ]=ℏ2[cosθe−iφsinθeiφsinθ−cosθ](式26.11)
通过我们在线性代数课上已经烂熟于胸的特征向量的求解过程,我们能算出它的两个本征态为:
|n+⟩=[cosθ2eiφsinθ2], |n−⟩=[−sinθ2eiφcosθ2](式26.12)
这样,关于自旋的最基本信息、也就是它的“量子三件套”,我们就全部给出来了。
这里再多说两句:
我们这里讨论自旋的时候,其实涉及了两个空间:一个是三维的物理空间,一个是自旋态所处的态空间。
它在三维物理空间中表现得和普通的三维角动量没太大区别,也是表示成三个基底,只是这三个基底不再是数,而是三个算符ˆSx,ˆSy,ˆSz,我们在式26.10中构造任意方向自旋算符时用到的内积运算,就是三个基底算符与方向向量的三个分量分别相乘后求和的结果,这也和普通的内积运算相似,仅仅是计算对象从数变成了算符而已;
而更值得我们讨论的是自旋的态空间,我们刚才为了“凑出”自旋y的本征态,“被迫”引入了复数,但以后我们会意识到,这个处理带来的变化,不仅仅是数域的扩张。实际上,从这一刻开始,我们就已经触碰到了一个全新的奇妙空间,它有着令人惊叹的、内涵丰富的代数结构,这一点我们未来会一点点体会。
现在我们还是回来关注这些算符和本征态本身。
回顾前面的构造过程,我们会发现一个问题:
上面的自旋算符和本征态其实都是我们连蒙带猜胡乱凑出来的……
啊不对,我们应该换个高情商的说法:
上面的自旋算符和本征态都是我们通过合理的想象构造出来的……
那么问题来了,这些“合理的想象”是不是真的合理呢?
要验证这一点,我们就要来继续考察,这些算符是否符合自旋的量子特性。
比如我们知道,自旋也是角动量的一种,那么我们首先需要验证的,就是自旋是否符合角动量的量子特性,比如最典型的就是各个方向上自旋算符的对易关系。
2) 自旋算符的对易关系
我们在第19课中看到,角动量算符在三个方向上的分量之间满足这些对易关系:
{[ˆJy,ˆJz]=iℏˆJx, [ˆJz,ˆJx]=iℏˆJy, [ˆJx,ˆJy]=iℏˆJz(a)[ˆJi,ˆJ2]=0(i=x,y,z)(b) (式26.13)
而自旋作为角动量的一种,自然也应该满足相同的关系。
我们把上面的式子原封不动抄一遍,把ˆJ换成自旋算符ˆS:
{[ˆSy,ˆSz]=iℏˆSx, [ˆSz,ˆSx]=iℏˆSy, [ˆSx,ˆSy]=iℏˆSz(a)[ˆSi,ˆS2]=0(i=x,y,z)(b) (式26.14)
然后来验证它们。
(a)组中的关系只需要简单的矩阵运算就能证明,以[ˆSy,ˆSz]为例:
[ˆSy,ˆSz]=ˆSyˆSz−ˆSzˆSy=ℏ24([0−ii0][100−1]−[100−1][0−ii0])=ℏ24[02i2i0]=iℏ⋅ℏ2[0110]=iℏˆSx(式26.15)
(剩下的[ˆSx,ˆSy]以及[ˆSz,ˆSx]请同学们自行验证)
(b)组中的关系更容易证明,因为:
ˆS2=ˆS2x+ˆS2y+ˆS2z=ℏ24[1001]+ℏ24[1001]+ℏ24[1001]=3ℏ24ˆI(式26.16)
其中ˆI是单位矩阵,它天然地就可以和任意算符对易,所以(b)组中的关系也天然成立。
这样,我们就看到了,用自旋矩阵描述的自旋算符满足角动量算符的对易关系。
这里我们也看到,自旋角动量和轨道角动量一样,三个分量之间互相不对易,也就意味着一个方向上的自旋确定时、另外两个方向的自旋处于不确定状态,这也是我们在第5课介绍的级联S-G实验中所看到的。
而另一方面,[ˆSz,ˆS2]=0也意味着[ˆSz,ˆS2x+ˆS2y]=0,也就是Sz分量确定时,虽然另外两个方向的角动量分量各自不确定,但它们的平方和却是确定的,对应的物理图像就是:
自旋角动量也是分布在以Sz=±ℏ2为高、√S2−S2z=ℏ√2为底面半径的圆锥面上,而总的自旋角动量S2的本征值也是我们前面给出的单位矩阵前的系数:
S2=34ℏ2(式26.17)
如果我们再回忆起轨道角动量的角量子数与总角动量的关系式:
l(l+1)ℏ2=L2(式26.18)
我们也能类比着定义出一个自旋角量子数s:
s(s+1)ℏ2=S2=34ℏ2(式26.19)
这意味着s也是一个常数,舍去负值,我们就得到:
s=12(式26.20)
(这正好就是自旋本征值的绝对值)
它和轨道角动量的唯一区别就是它只有一个值而不是一组数。
到此,我们就看到,前面构造的各个方向的自旋算符,是符合角动量算符的量子特性的,可以放心使用。
那么接下来,我们就要来回答这节课的最后一个问题:
怎么样才能将自旋信息融合到波函数和薛定谔方程中去?
3) 含自旋信息的波函数
在波函数中加入自旋信息其实很简单:
直接用波函数乘以自旋量子态,就搞定了。
比如,我们假设某个粒子的自旋态处于|z+⟩与|z−⟩的叠加态:
|S⟩=c+|z+⟩+c−|z−⟩=[c+c−] (式26.21)
其中|c+|2+|c−|2=1
那么将它的波函数信息加进去,就是:
|ψ,S⟩=[c+ψ(x,t)c−ψ(x,t)]=[c+c−]ψ(x,t):=[ψ1ψ2](式26.22)
(这在数学上可以看成表示经典力学量量子态的波函数和表示自旋量子态的二维“向量”的直积)
我们可以验证这样做的合理性。
我们知道,自旋作为一种完全独立于经典力学量的“纯量子力学量”,它与各种经典力学量是互不干扰的。这就意味着,无论自旋处于什么态,都不会影响到其他力学量的概率分布结果,反过来也是一样。
比如,对于刚才给出的粒子的状态,我们要去测量它出现在空间中x处的概率,仍然有:
ρ(x,t)=([c∗+c∗−]ψ∗(x,t))([c+c−]ψ(x,t))=(|c+|2+|c−|2)ψ∗(x,t)ψ(x,t)=ψ∗(x,t)ψ(x,t)(式26.23)
可以看到,最终结果与c+,c−无关,也就是自旋态并没有影响到位置的概率分布。
反过来,测量z方向自旋时,坍缩到两个本征态|z+⟩,|z−⟩上的概率,也分别是:
{P(|z+⟩)=∫R(c+ψ∗)c+ψdx=c∗+c+∫Rψ∗ψdx=c∗+c+=|c+|2P(|z−⟩)=∫R(c−ψ∗)c−ψdx=c∗−c−∫Rψ∗ψdx=c∗−c−=|c−|2(式26.24)
这两个值也完全与波函数无关,也就是波函数并没有影响到自旋的概率分布。
所以,经过直积运算融合后的自旋态和原来的波函数仍然可以互不干扰。
接下来,我们来看看如何将自旋信息融入到薛定谔方程中去。
4) 含自旋信息的薛定谔方程
我们在第23课中知道,自旋的发现,是因为自旋磁矩与外磁场(人为加上的磁场或者轨道角动量产生的磁场)相互作用产生了耦合能,从而进一步产生了能级分裂。
所以,要在薛定谔方程中“有物理意义地”体现自旋信息,我们就要考虑有外磁场存在的情形。
为简单起见,我们假设外磁场的方向为+z方向(由于空间在各个方向上是对称的,因此这样做并不会失去一般性)、磁感应强度大小为B,而自旋可能有±ℏ2两种取值,于是耦合能也就有两种可能:
EC,±=±μSB=±ℏ2−e2mecB(式26.25)
(其中μS为自旋磁矩)
将它们作为势能的补充项代入薛定谔方程中,薛定谔方程就变成了两个:
{iℏ∂∂tψ1=−ℏ22m∇2ψ1+Vψ1+ℏ2−eB2mecψ1iℏ∂∂tψ2=−ℏ22m∇2ψ2+Vψ2−ℏ2−eB2mecψ2(式26.26)
(两个方程对应两个不同的能量本征值,这也是能级分裂来源的又一次体现)
我们可以将它们合并成矩阵形式:
iℏ∂∂t[ψ1ψ2]=[−ℏ22m∇2+V−ℏ2eB2mec00−ℏ22m∇2+V+ℏ2eB2mec][ψ1ψ2](式26.27)
为了让这个方程更有“自旋”的味道,我们还可以将它拆一拆:
iℏ∂∂t[ψ1ψ2]=(−ℏ22m∇2+V)[1001][ψ1ψ2]+ℏ2−eB2mec[100−1][ψ1ψ2](式26.28)
我们看到,右边第二项中的矩阵恰好就是自旋算符ˆSz(这当然不是巧合,我们其实只是把前面构造ˆSz的过程在薛定谔方程中重复了一遍而已)
于是方程可以写成算符形式:
iℏ∂∂t|ψ,S⟩=(ˆp22m+ˆV+−eB2mecˆS)|ψ,S⟩(式26.29)
如果磁场方向是一般方向,右边括号中第三项就是磁场与自旋算符的内积:
iℏ∂∂t|ψ,S⟩=(ˆp22m+ˆV+−e2mecB⋅ˆS)|ψ,S⟩=(−ℏ22m∇2+V)[1001][ψ1ψ2]+ℏ2−e2mec[BzBx−iByBx+iBy−Bz][ψ1ψ2](式26.30)
这就是考虑了自旋的薛定谔方程,又称作“泡利方程”。
我们从这个方程的形式中可以看出,自旋信息是通过与外磁场的耦合产生的能量项体现出来的,假如没有外磁场,那么与自旋有关的项就变成了零,泡利方程就退化为:
iℏ∂∂t[ψ1ψ2]=(−ℏ22m∇2+V)[1001][ψ1ψ2](式26.31)
也就是两个普通的、独立的薛定谔方程:
{iℏ∂∂tψ1=−ℏ22m∇2ψ1+Vψ1iℏ∂∂tψ2=−ℏ22m∇2ψ2+Vψ2(式26.32)
这个时候,由于没有任何外场产生“测量”自旋的行为,自旋信息就变成了“我房间里有个会喷火的龙但我看不见它”,这种情形下,强行拆分成两个方程其实并不具有可测量的物理意义,本质上和无自旋的薛定谔方程也就没什么区别了。
5) 总结和预告
这节课里,我们介绍了三个坐标方向、以及任意方向的自旋的算符(泡利矩阵)和本征态:
{ˆSx=ℏ2[0110]|x+⟩=[1√21√2]|x−⟩=[−1√21√2]ˆSy=ℏ2[0−ii0]|y+⟩=[1√2i√2]|y−⟩=[−1√2i√2]ˆSz=ℏ2[100−1]|z+⟩=[10]|z−⟩=[01]ˆSn=[cosθe−iφsinθeiφsinθ−cosθ]|n+⟩=[cosθ2eiφsinθ2]|n−⟩=[−sinθ2eiφcosθ2](式26.33)
然后,我们通过将它们的对易关系与一般角动量算符的对易关系进行对照,确信了这样的构造方式是合理的。
接下来,我们就将自旋信息融入到波函数和薛定谔方程中,通过简单的直积运算构造了包含自旋信息的波函数:
|ψ,S⟩=[c+ψ(x,t)c−ψ(x,t)](式26.34)
然后通过在薛定谔方程中加入自旋与外磁场的耦合能,构造了包含自旋的薛定谔方程、也就是泡利方程:
iℏ∂∂t|ψ,S⟩=(ˆp22m+ˆV+−e2mecB⋅ˆS)|ψ,S⟩(式26.30)
这个方程其实隐含了自旋的发现过程:自旋信息并不是从无到有直接推导出来的,而是因为物理上测量到了它(自旋在外磁场作用下的能级分裂),然后将它与外场的耦合能作为修正项加进薛定谔方程,才将方程扩展成二维形式,并且形成了单独的自旋项。
而如果没有外场去“测量”自旋,那么耦合能那一项会变成零,方程又将退化为薛定谔方程,自旋也会变成冗余信息,而不会天然地包含在薛定谔方程中,薛定谔方程也完全没有写成矩阵形式的必要。
这一点对K-G方程而言也是一样的,它们都不会“天然地”将代表自旋算符的泡利矩阵包含进去。
那么,有没有什么方程“天然地”就包含了泡利矩阵呢?
联想到自旋在量级上和相对论之间的若有若无的联系,我们还是回到相对论性方程中去找。
而再联想到上节课我们提到,为了构造满足相对论协变对称性的一阶方程(以解决负概率问题),我们需要在没有根号的情况下对能量开平方,而这也要求开方后各项系数必须是矩阵,没错,又是矩阵。
那么接下来的事情就是水到渠成了,我们马上就要来见识量子力学初创时期最天才的想法,看看如何将泡利矩阵自然地引入到相对论性的能量本征方程中去。
编辑于 2023-01-25 22:09・IP 属地四川