
fmingde
版次: 2024-2
了解本系列其他文章,请浏览目录:
《大学物理》内容提要目录
§1 质点运动学
一、描述质点运动的物理量(线量)
1. 位置矢量 →r
1)由参考点指向质点位置的矢量;2)位置矢量随时间的变化关系,称为运动方程→r(t);3)运动方程完整的描述了质点运动,由运动方程可导出其他描述质点运动的物理量、表达式。
2. 位移矢量 Δ→r=→r2−→r1
反映位置变化(方位及距离)
3. (瞬时)速度矢量 →v=d→rdt
1)是平均速度(¯→v=Δ→rΔt)的极限;2)是位置矢量对时间的变化率;3)反映质点空间位置变化的快慢和方向。
4. (瞬时)加速度矢量 →a=d→vdt
1)是平均加速度(¯→a=Δ→vΔt)的极限;2)是速度矢量对时间的变化率;3)反映速度对时间的变化快慢和方向。
5. 小结: 位置矢量、速度矢量、加速度矢量的联系
(1)后者是前者的“变化率”
→r(t)d→rdt=→v→→v(t)d→vdt=→a→→a(t)
(2)前者是后者的“累积”
→r(t)←→r=→r0+∫tt0→vdt→v(t)←→v=→v0+∫tt0→adt→a(t)
(3)备注:由导数式→v=d→rdt,转化为积分式的过程:
→v=d→rdt移项→→vdt=d→r两边定积分→上下限对应∫tt0→vdt=∫→r→r0d→r
→v对t积分,得到的是位置矢量增量(即位移)Δ→r=→r−→r0 ,类似地, →a对t积分,得到的是→v的增量Δ→v=→v2−→v1
计算要求:★★已知运动方程,1)求速度加速度、轨迹等 2)判断运动特点
典型习题:三、1
计算要求:★★★已知加速度或速度, 并辅以初始条件,求运动方程
典型习题:三、3
6. 备注:直角坐标系下各量、各关系的分解形式
→r=x→i+y→j+z→k Δ→r=Δx→i+Δy→j+Δz→k
→v=vx→i+vy→j+vz→k
→a=ax→i+ay→j+az→k
→v=d→rdt=dxdt→i+dydt→j+dzdt→k
→a=d→vdt=d2→rdt2=d2xdt2→i+d2ydt2→j+d2zdt2→k
7. 备注:微分式到积分式的变换过程
(1)由微分式进行积分
将导数式,整理为微分等式,两边加积分号。
为了使两边的积分可展开,需“分离变量”,将与被积变量相关的项移到被积变量同侧。
例:v=kx v展开→dxdt=kx 分离变量→1xdx=kdt
两边加积分号→∫x2x11xdx=∫t2t1kdt
(2) 变上限积分 将定积分上限指定为变量本身,得到变量间的函数关系
例:v=kx 改写成积分→∫xx01xdx=∫tt0kdt
→lnx−lnx0=k(t−t0) →x=x0ek(t−t0)
(3)变换被积变量
某些问题中,需要将对时间的积分,变成对位置量(坐标、角度等)的积分。
1)变换方法:尝试在导数式的上下部分同时“乘以”中间变量的微分。
例: dvdt=dvdtdθdθ=ωdvdθ,然后移项、积分。
2)典型应用:
圆周运动 -乘以角坐标的微分(如:dθ)
直线运动(分运动) -乘以坐标的微分(如:dx)
曲线运动 -乘以路程的微分(如: ds)
8. 注意:矢量符号、标量符号的意义
以速度矢量→v为例:
v:速度矢量的大小,v=|→v| ,与速率相同
Δ→v :速度矢量的增量Δ→v=→v2−→v1
|Δ→v|:速度矢量增量的大小|Δ→v|=|→v2−→v1|
Δv :速率的增量,Δv=v2−v1=|→v2|−|→v1|
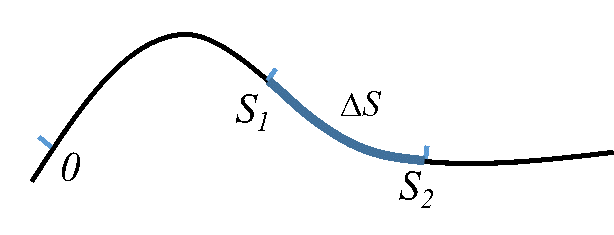
9. 注意:路程等相关概念
路程:ΔS ,(Δt时间内)运动轨迹的长度
用了增量符号Δ,可理解为:ΔS=S2−S1,S是自计时起点起,运动轨迹的长度值。
平均速率: ¯v=ΔSΔt
瞬时速率:v=dSdt , 平均速率的极限
因dS=|d→r| ,瞬时速率即为瞬时速度矢量的大小。(故速率的符号为v,v=|→v| )
二、加速度(按自然坐标系)的分解
1. 自然坐标系
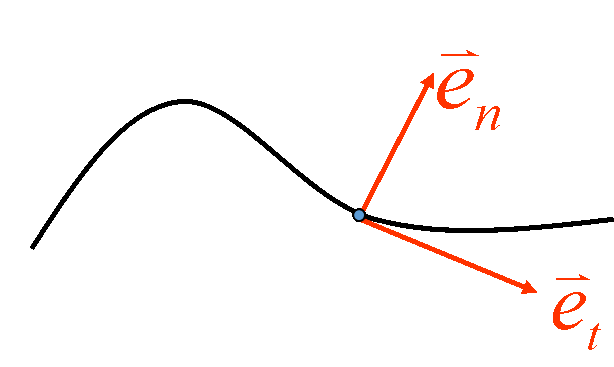
切向,沿质点前进方向为正,单位矢量→et
法向,轨迹凹侧为正,单位矢量→en
自然坐标系主要用于力、加速度等的分解。
2. 加速度的分解,切向加速度和法向加速度
加速度,可按自然坐标系,分解为切向加速度和法向加速度。
→a=at→et+an→en
at=dvdt 切向加速度 — 反映速度大小的变化
an=v2ρ法向加速度 — 反映速度方向的变化
三、(圆周)运动的角量描述
1. 角坐标、角位置 θ
角坐标随时间的变化关系θ(t),称为角量运动方程。
2. 角速度 ω=dθdt
3. 角加速度 α=dωdt
4. 小结: 角坐标、角速度、角加速度的联系
(1)后者是前者的“变化率”
θ(t)dθdt=ω→ω(t)dωdt=α→α(t)
(2)前者是后者的“累积”
θ(t)←θ=θ0+∫tt0ωdtω(t)←ω=ω0+∫tt0αdtα(t)
5. 与线量的联系
对距圆心r处的点:
速率:v=rω
加速度分量: {at=rα an=rω2
计算要求:★已知角量运动方程,1)求角速度、加速度 2)求相应的线 速度、法向加速度、切向加速度
典型习题:三、4
四、(伽利略)速度变换式, 运动的相对性
1. (伽利略)速度变换式 →v=→v′+→u
→v :质点相对基本参考系S的速度,→v′ :质点相对运动参考系S′的速度记为(相对速度),→u:运动参考系S′相对基本参考系S的速度。
推广形式:→vAB=→vAC+→vCB,A相对于B的速度,等于A相对于C的速度与C相对于B的速度的矢量和。
计算要求:★运用速度变换,求相对速度。 常融合在其他力学问题中。
典型习题:三、6
§2 牛顿定律
一、牛顿三大运动定律
1. 牛顿第一定律
任何物体都保持静止或匀速直线运动的状态,直至其它物体对它作用的力迫使它改变这种状态。
牛顿第一定律指出物体具有惯性,并定义了惯性参考系:符合第一定律的参考系,称为惯性参考系。
2. 牛顿第二定律 →F=m→a
揭示了力是引起运动状态改变的原因
(1)原始形式 →F=d→pdt
因(经典力学中)质量是常数, →F=d→pdt=md→vdt=m→a
(2)在直角坐标系下:→F=max→i+may→j+maz→k
分量式为 {Fx=max Fy=may Fz=maz
(3)在自然坐标系下:→F=m(→at+→an)=mdvdt→et+mv2ρ→en
分量式为{Ft=mat=mdvdt Fn=man=mv2ρ
3. 牛顿第三定律
两个物体之间的作用力和反作用力沿同一直线,大小相等,方向相反,分别作用在两个物体上。→F=−→F′
二、牛顿定律应用
1. 常见的三类力
1)万有引力(重力);2)弹性力(压力、支持力、拉力、弹簧弹力) ;3)摩擦力(静摩擦力、滑动摩檫力)
2. 牛顿定律的应用
(1) 确定研究对象:质点或质点组合
(2)单个质点的受力分析
质点在力场中,存在场力,如重力、静电力
与其他物体相互接触,可能存在弹性力,如压力、支持力、拉力、弹簧弹力
与其他物体接触,并有相对运动,或有相对运动趋势,存在摩擦力
(3)运动状态分析
各质点的牛顿第二定律分量式
质点之间的牵连关系
计算要求: ★★一般运动中,牛顿第二定律的应用 多个牵连物体(如滑轮悬挂), 需对各物体应用牛顿第二定律,联立方程组求解
典型习题:三、1,2
计算要求:★★圆周运动中牛顿第二定律的应用 需要法向加速度以及法向(向心)力
典型习题:三、3
§3 动量守恒定律和能量守恒定律
一、动量定理、动量守恒定律 - 力对时间的累计效应
1. 质点的动量定理 ∫t2t1→Fdt=→p2−→p1
1)力对时间的累积 → 动量的增量 ;2)→I=∫t2t1→Fdt 称为“冲量”;3)→p=m→v, 质点的动量
2. 质点系的动量定理 ∫t2t1→Fexdt=→p2−→p1
1)合外力对时间的累积 → 系统动量的增量;2)描述的是两个及以上的质点组成的质点系统,需区分内力(→Fin)、外力(→Fex)。3)内力对系统的动量改变无贡献(成对内力的合冲量为零)
3. (质点系的)动量守恒定律
1)若→Fex=0,→p=恒矢量;2)在直角坐标系中,若某一坐标轴方向外力为零,则“该方向的动量守恒”。(总动量不一定守恒)
如: 若Fx=0, px=恒量。
计算要求:★★动量定理应用。 1)冲量的直接计算(力对时间积分)和间接计算(动量的增量) 2)确定末运动状态 3)计算平均冲力
典型习题:一、1,2
计算要求:★★★由动量守恒定律应用。 1)碰撞问题 2)某一方向上的动量守恒
典型习题: 一、3
二、动能定理 - 力对空间的累计效应
1. 功 W=∫ba→F⋅d→r
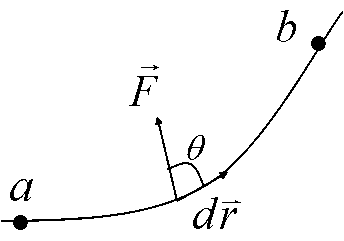
力对物体所做的元功等于力在物体位移方向的分量(切向力)与元位移大小的乘积,总功是过程中元功的数量和。
1)dW=→F⋅d→r W=∫ba→F⋅d→r; 2)分解式 W=∫xbxaFxdx+∫ybyaFydy+∫zbzaFzdz;3)对恒力,简化为: W=→F⋅Δ→r
2. 动能 Ek=12mv2、质点的动能定理 W=Ek2−Ek1
简单表示为W=ΔEk, 功等于质点动能的增量
3. 质点系的动能定理 Wex+Win=Ek2−Ek1
所有力(内力、外力)的功等于系统动能的增量
成对内力所作的总功不一定为零。是否做功取决于两受力物体有无相对位移。
计算要求:★★动能定理的应用。 1)功的直接计算(力对时间积分)和间接计算(动能增量) 2)确定末运动状态
典型习题:一、4, 5
三、(物体系)的势能
1. 保守力
做功只由起点、终点位置决定的力
保守力做功与路径无关
2. 势能 Ep
对保守力,可定义对应的势能。保守力在两位置间做的功,等于该势能在两位置间的减少量(增量的负值)。 W=−ΔEp
势能是相对的,指定势能零点后,才能确定各位置的势能取值。
势能属于产生保守力相互作用的系统,引用势能时,隐含选择了以系统为研究对象。
3. 常见势能
(1)重力势能Ep=mgh
h为相对势能零点平面的高度。重力势能属于物体和地球组成的系统。
(2)弹簧的弹性势能Ep=12kx2
x为弹簧的伸长量。弹簧的弹性势能属于弹簧和物体组成的系统。
计算要求:势能的计算,常融合在功能原理、机械能守恒定律等问题中
四、功能原理和机械能守恒
1. 机械能 E=Ek+Ep
系统动能和势能的总和
2. 功能原理 Wex+Winnc=E2−E1
外力和非保守内力的功,等于系统机械能的增量
对保守力引入势能后,保守力作的功可用势能的变化代替。故质点系的动能定理,可变化为用机械能表达。
2. 机械能守恒 若Wex+Winnc=0, E=恒量
只有保守力(重力、弹力等)做功时,可适当选择系统,使保守力成为内力。此时,系统的机械能守恒。
计算要求:★★★机械能守恒定律的运用
典型习题:三、6
五、质心,质心运动定律
1. 质心 →rc=1M∫→rdm
其中M=∫dm ,为质点系总质量
1)质心是质点系质量分布的平均位置;2)分量式: xc=1M∫xdm yc=1M∫ydm zc=1M∫zdm ; 3)对密度均匀、形状对称的物体,质心在其几何中心.
2. 质心运动定律 →Fex=M→ac
作用在系统上的合外力等于系统的总质量与系统质心加速度的乘积。
计算要求:质心的计算
典型习题:三、7