
PeiLingX
物理学等 2 个话题下的优秀答主
本文是深度科普系列《从线性代数到量子力学》第22课。
本系列及本专栏其他文章,建议收藏目录:
0) 开篇语
在理论物理中,对称性始终是物理学家们所追求的终极美之一。
量子力学中的对称性,也是一条非常深刻又令人感到赏心悦目的主线,我们会在这个系列的最后部分去细细地品味。
不过,在此之前,我们可以先来做一个热身,观赏一下氢原子(以及一切球对称势的)薛定谔方程解的球对称性,因为这里埋伏了一个初学者经常会遇到的困惑。而在解开这个困惑的过程中,我们也可以提前体验一下,如何分别从物理直观上和从数学形式上去理解对称性。
我们先来梳理一下这个困惑。
我们知道,对于一个孤立的、没有任何其他外场存在的氢原子而言,它的原子核产生的库仑势$ \small V(r) $只与点到原子核的距离$ \small r $有关,而与方向无关。因此,物理直觉上,我们会很自然地推测:这种球对称的物理体系中的薛定谔方程解也应该具有某种球对称性。
但问题在于,这种球对称性会以什么形式存在呢?
回答这个问题之前,我们其实需要先来明确一件事情:什么是对称性?
1) 什么是对称性?
我们所能想到的最直观的对称,当然是几何图形的对称,比如当我们看到故宫太和殿、看到正方形、看到圆形的时候,都会知道它们蕴含了某种对称性。
而我们还知道,它们的“对称度”还有些区别:
太和殿的对称性只有1种:左右对称,也就是将它沿着中轴线左右翻转后,它的形状会保持不变,仍然与原来的图形重合;
正方形的对称性有7种:沿着两个中轴线翻转、沿着两个对角线翻转、绕着中心点旋转90°、180°、270°,它都能保持形状不变;
而圆形的对称性就有无穷多种了:沿着任意一条直径翻转、绕着圆心旋转任意角度,最后得到的仍然是原来那个圆。
当然,这些图形的“对称度”并不是我们现在关心的问题,我们关心的是如何定义对称性。
而从上面这些描述中,我们其实可以总结出一条关于几何图形对称性的共同的定义来:
一个图形在某种变换(比如前面提到的翻转、旋转等)下保持形状不变(与变换前的形状重合)的特性。
有了这句话,我们就可以来说一说物理模型的对称性了。
对于一个物理模型而言,对称性的描述其实也和几何图形一样,只不过描述对象从图形变成了物理对象而已:
一个物理对象在某种变换下保持不变的特性。
(这个所谓物理对象可以是物理量、物理方程、甚至某种物理性质)
那么现在问题又来了:几何上的图形和变换都能很直观地看到或者动手比划一下,但是物理上的变换应该怎么去描述呢?
如果只是对普通大众解释这种对称,我们其实可以尝试着用图形去类比(比如徐一鸿那本著名的《可畏的对称》),只不过这很难触及到物理意义上的对称性的“灵魂”,但好在我们和普通大众还是有一点区别的:我们手里有可以“触及灵魂”的工具:数学,我们将用它来真正理解物理学意义上的对称。
为了更好地体验从几何直观到数学抽象的转变,我们不妨先用几何图形的对称性来练练手:
比如,刚才讨论圆的对称性的时候,我们提到,让一个圆绕圆心旋转任意角度,它的形状都保持不变,现在,我们要将这个几何上的直观经验抽象成数学方程。
首先,我们写出一个单位圆的方程:
$\small x^2+y^2=1 \quad{\scriptsize (式22.1)}$
接下来,我们来寻找旋转变换的数学描述。
而我们很容易从几何上证明(请同学们自己试一下),平面上一个位于$ \small (x,y) $的点,绕着原点旋转$ \small \theta $角后,新的点的坐标为:
$\small \begin{bmatrix}x'\\y'\end{bmatrix}= \begin{bmatrix}\cos\theta&-\sin\theta\\sin\theta&\cos\theta\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}$
于是,在这样的变换下,我们不难证明:
$\small \begin{align} x'^2+y'^2&=\left(x\cos\theta-y\sin\theta\right)^2+\left(x\sin\theta+y\cos\theta\right)^2\ &=\cdots\quad {\scriptsize(请自行补充省略步骤)}\ &=x^2+y^2\ &=1 \end{align} \quad{\scriptsize (式22.2)}$
也就是说,圆经过旋转变换后,圆上的点从$ \small \left(x,y\right) $旋转到了$ \small \left(x',y'\right) $,但圆的方程仍然还是$ \small \begin{align} x'^2+y'^2=1 \end{align} $,方程的形式还是原来那个样子,而这在几何上就体现为:一个圆绕圆心旋转后,仍然与原来的圆重合。
(同学们有兴趣可以思考一下圆沿着某个直径翻转的变换矩阵怎么推导,并且以此证明圆的方程在翻转变换下也保持不变的几何性质)
现在,我们大致知道了如何将直观的几何对称性抽象为方程或函数形式的抽象对称性(即某个方程或函数在某种变换下保持某种形式或性质不变),就可以摆脱对直觉的依赖,来处理物理学意义上的对称性了。
我们还是回到具有球对称性的薛定谔方程中来感受这件事情。
刚才我们提到,物理意义上的对称性,是指某个物理对象在某种变换下保持形式不变的性质。再具体一点说,这个物理对象可以是某个函数、可以是某个物理方程或者物理定律、也可以是某种共同的物理性质。
对于球对称势场中的粒子(比如氢原子模型)而言,我们会很自然地期待它的本征函数解也具有某种球对称性,这就意味着,这些本征函数必然有某种性质与空间中的方向无关,也就是在空间旋转变换下保持不变。
根据几何上最直观的猜测,我们可能会首先想到,本征函数的球对称性也许意味着:它的函数形式(以及函数图像)在空间旋转变换下保持不变,也就是说,如果我们将函数图像绕着某个轴旋转某个角度,它也仍然是原来的图像。
现在我们来看看实际是不是这样。
2) 球对称性还在吗?
在上节课中我们知道,氢原子的本征函数由径向和角向两部分组成:
$\small \psi_{nlm}(r,\theta,\varphi)=R_{nl}(r)Y_{lm}(\theta,\varphi) \quad{\scriptsize (式21.9)}$
其中径向函数只与半径$ \small r $有关而与角度无关,具有天然的球对称性,所以我们主要是来看角向解,也就是球谐函数$ \small Y_{lm}(\theta,\varphi) $是否也具有球对称性。
不难想象,如果$ \small Y_{lm}(\theta,\varphi) $具有几何意义上的球对称性、即函数值与方向无关,那么它的函数图像一定是一个球面(这个球面的半径是$ \small Y_{lm}(\theta,\varphi) $的函数值而不是一个空间距离)
由于球谐函数是一个复变函数,无法直接画出图像来,所以我们不妨转而求它的模平方,也就是电子出现在各个方向上的概率密度,通过概率密度函数$ \small \begin{align} f_{lm}(\theta,\varphi)&=\left|Y_{lm}(\theta,\varphi)\right|^2 \end{align} $来看看函数图像是否是球形[1]:
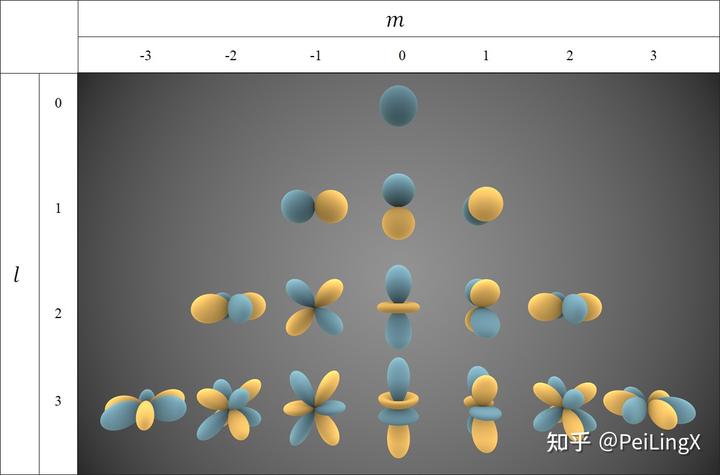
然后我们震惊了:除了$ \small f_{00}=\left|Y_{00}(\theta,\varphi)\right|^2 $以外,其他几个$ \small f_{lm} $对应的图像都不具有球对称性。
是不是我们对本征函数球对称性的物理直觉错了?
实际上,如果我们仔细想一想,就会意识到一件事情:在建立薛定谔方程之前,我们已经先建立了一个球坐标系,并且在其中预先指定了北极方向(也就是 $\small z $轴方向),然后我们才建立了具体的薛定谔方程、得到了本征函数解。
换句话说,本征函数的“特殊方向性”是和$ \small z $轴的方向选取绑定在一起的,而这种方向选取只是一种数学上的操作,物理上并不能真实地区分。
这样一来,无论我们选取哪个方向作为$ \small z $轴,最终都能得到一组方向不同、但在各自坐标系下形式完全相同的球谐函数作为方程的解。
反过来说,这就意味着,即使我们将球谐函数进行任意转动,转动后得到的新函数(相当于转动后的坐标系下解得的球谐函数)虽然不再与原来的函数重合,但它们仍然是同一能级的本征函数。本征函数的这种空间取向的任意性就是一种球对称。
而只要我们不去测量电子的能量,不让它坍缩到某个具体的本征态上,这种取向的任意性、或者说球对称性就不会被破坏。
不过,上面的讨论还只是停留在一种模糊的文字描述上,接下来,我们需要将这个物理直觉转化为数学语言,因为这将让我们再次体验一下物理直觉、微分方程和线性代数之间的美妙联系,同时也能为我们将来理解更多的对称性做好数学上的铺垫。
3) 方程解的球对称性
我们先从方程的角度来理解这个对称性。
由于我们是在解定态薛定谔方程,因此我们提到球对称模型的时候,其实主要说的是哈密顿算符的球对称性。
我们先将球坐标下的薛定谔方程中的哈密顿算符提取出来:
$\small H=-\frac{\hbar^2}{2m_e}\left[\frac{1}{r^2}\frac{\partial }{\partial r}\left(r^2\frac{\partial }{\partial r}\right)+\frac{1}{r^2\sin\theta}\frac{\partial }{\partial \theta}\left(\sin\theta\frac{\partial }{\partial \theta}\right)+\frac{1}{r^2\sin^2\theta}\frac{\partial^2 }{\partial \varphi^2}\right]+V(r)\quad{\scriptsize (式22.3)}$
所谓球对称,其实就意味着,在空间转动下,哈密顿算符的形式保持不变。
直觉上我们知道,三维空间中并没有哪个方向是特殊的,所以无论我们选取哪个方向作为球坐标的北极方向$($也就是$ \small z $方向$)$,方括号中关于动能的部分(对角度的导数)都会有相同的形式,也就是说,哈密顿算符的动能项在坐标方向的变换(也就是空间旋转变换)下保持形式不变。
而方括号外的势能项$ \small V(r) $以及径向动能项(对半径的导数)也与方向无关,所以它们在空间旋转变换下也具有不变的形式。
动能与势能两部分一合起来,整个哈密顿算符也就在空间旋转变换下具有了不变的形式,无论我们怎么选取坐标方向,它都是式22.3那个形式。
这就是哈密顿算符的球对称性。
现在我们将它作用在某个态$ \small \left|\psi\right> $上,来看看球对称势场中定态薛定谔方程的对称性:
$\small -\frac{\hbar^2}{2m_e}\left[\frac{1}{r^2}\frac{\partial }{\partial r}\left(r^2\frac{\partial \psi}{\partial r}\right)+\frac{1}{r^2\sin\theta}\frac{\partial }{\partial \theta}\left(\sin\theta\frac{\partial \psi}{\partial \theta}\right)+\frac{1}{r^2\sin^2\theta}\frac{\partial^2 \psi}{\partial \varphi^2}\right]+V(r)\psi=E\psi \quad{\scriptsize (式18.7)}$
由于哈密顿算符在空间旋转变换下具有不变形式,因此薛定谔方程本身在空间旋转变换下也不会发生改变。
也就是说,假设我们重新选了一个$ \small z' $轴,得到新的$ \small \left(r',\theta',\varphi'\right) $坐标,由于$ \small V(r) $项不受$ \small \theta,\varphi $变换的影响,因此旋转后它仍然还是原来那个函数形式,于是薛定谔方程还是原来那个形式:
$\small -\frac{\hbar^2}{2m_e}\left[\frac{1}{r^2}\frac{\partial }{\partial r}\left(r^2\frac{\partial \psi'}{\partial r}\right)+\frac{1}{r^2\sin\theta'}\frac{\partial }{\partial \theta'}\left(\sin\theta'\frac{\partial \psi'}{\partial \theta'}\right)+\frac{1}{r^2\sin^2\theta'}\frac{\partial^2 \psi'}{\partial \varphi'^2}\right]+V(r)\psi'=E\psi' \quad{\scriptsize (式22.4)}$
这就是整个模型的球对称性。
接下来我们来理解相应的本征函数的球对称性。
我们知道,如果方程形式不变,那么经过变换后的新方程求解出来的本征函数自然也就具有与原来相同的形式,仍然是$ \small R_{nl}(r) $乘以球谐函数的形式:
$\small \begin{align} \psi'_{nlm}(\theta',\varphi')=R_{nl}(r)Y_{lm}(\theta',\varphi') \end{align} \quad{\scriptsize (式22.5)}$
其中$ \small R_{nl}(r) $具有天然的球对称性,不需要再考虑。
而对于球谐函数而言,不难想象的是,如果我们将这里新得到的$ \small Y_{lm}\left(\theta',\varphi'\right) $放回旋转变换前的坐标系$ \small (r,\theta,\varphi) $中,那么它的函数形式将变为原坐标系$ \small (r,\theta,\varphi) $中的本征函数$ \small Y_{lm}\left(\theta,\varphi\right) $旋转到$ \small z' $轴所得到的那个新函数,它们的函数图像也会完全重合。
换句话说,当我们对一个球谐函数进行空间旋转时,旋转后得到的新函数仍然是同一个能量本征值对应的本征态(如果让$ \small z $轴也跟着旋转,那么将再次得到球谐函数的形式),而这个性质就保证了相同形式的本征函数取向的任意性(也就对应了$ \small z $轴取向的任意性),这就是我们要寻找的那个隐藏的球对称性。
接下来,我们要从另外一个更抽象的、也更具有线性代数味道的方式来证明这一点,这将让我们再次体会到物理方程和线性代数之间的微妙联系,也将有助于我们将来深入理解更多的对称性。
4) 球对称性的抽象证明
我们先来回顾第17课中曾经提到过的一个简单的线性代数例子:
假设一个矩阵$ \small A $是一个单位矩阵的常数倍,即:
$\small A=aI \quad{\scriptsize(式17.26)}$
那么它的特征值就只有一个$ \small a $,而在这种情况下,它的特征向量可以是任意一组正交基。
比如对于一个$3$×$3$矩阵$ \scriptsize A=\begin{bmatrix}a&0&0\\0&a&0\\0&0&a\end{bmatrix} $而言,它的特征向量组既可以是$ \small \begin{align} \boldsymbol \alpha_1=\left(\begin{matrix}1,0,0\end{matrix}\right)\end{align} $、$ \small \begin{align} \boldsymbol \alpha_2=\left(\begin{matrix}0,1,0\end{matrix}\right) \end{align} $、$ \small \begin{align} \boldsymbol \alpha_3=\left(\begin{matrix}0,0,1\end{matrix}\right) \end{align} $这种特殊的基底,也可以是其他任意一组单位正交基底。
这就意味着,虽然某一组特征向量在空间中具有特殊的方向性,但特征向量的取向的可能性却遍布了空间中所有方向,这就蕴含了矩阵$ \small A $的特征向量解的球对称性(而这也和球对称模型中本征函数的球对称性有着异曲同工之妙)。
现在,我们来把这件看起来很显然的事情证明一遍。
首先,我们可以证明,矩阵$ \small A $在旋转变换下的相似矩阵仍然是它自身,即:
$\small \boldsymbol A'=\boldsymbol R\boldsymbol A\boldsymbol R^{-1}=a\boldsymbol R\boldsymbol I\boldsymbol R^{-1}=a\boldsymbol I=\boldsymbol A \quad{\scriptsize (式22.6)}$
(顺便说一句,这里的旋转矩阵由所谓罗德里格斯公式给出:
$\small \boldsymbol R=\boldsymbol I+\sin\theta\boldsymbol N+(1-\cos\theta)\boldsymbol N^2 \quad{\scriptsize (式22.7)}$
其中,$ \small \boldsymbol I $是单位矩阵,而矩阵$ \small \boldsymbol N $由旋转轴单位向量$ \scriptsize \boldsymbol n=\left(\begin{matrix}n_x\\n_y\\n_z\end{matrix}\right) $的分量构成:$ \scriptsize \boldsymbol N=\left(\begin{matrix}0&-n_z&n_y\\n_z&0&-n_x\\-n_y&n_x&0\end{matrix}\right) $,它的好处是可以将向量的叉乘$ \small \boldsymbol n\times \boldsymbol u $化为矩阵相乘的形式:$ \small \boldsymbol n\times \boldsymbol u=\boldsymbol N\boldsymbol u $,方便运算和推导。
虽然我们知不知道这个矩阵都不妨碍式22.6的证明,但我们最好还是了解一下三维向量空间中的旋转矩阵长什么样)
现在,假设某个$ \small \boldsymbol \alpha $是$ \small \boldsymbol A $的特征向量:
$\small \boldsymbol A\boldsymbol \alpha=a\boldsymbol \alpha \quad{\scriptsize (式22.8)}$
然后我们将证明,它经过旋转变换后,得到的新的向量$ \small \boldsymbol \alpha'=\boldsymbol R\boldsymbol \alpha $仍然是$ \small \boldsymbol A $的特征向量。
证明其实很简单,首先形式上写出:
$\small \boldsymbol A\boldsymbol \alpha'=\boldsymbol A\boldsymbol R\boldsymbol \alpha \quad{\scriptsize (式22.9)}$
然后利用$ \small \boldsymbol A=\boldsymbol A'=\boldsymbol R\boldsymbol A\boldsymbol R^{-1} $,可得:
$\small \boldsymbol A\boldsymbol \alpha'=\boldsymbol R\boldsymbol A\boldsymbol R^{-1}\boldsymbol R\boldsymbol \alpha=\boldsymbol R\boldsymbol A\boldsymbol \alpha=\boldsymbol Ra \boldsymbol \alpha=a \boldsymbol R\boldsymbol \alpha=a \boldsymbol \alpha' \quad{\scriptsize (式22.10)}$
这就说明,$ \small \boldsymbol \alpha'=\boldsymbol R\boldsymbol \alpha $仍然是同一个矩阵$ \small \boldsymbol A $的特征向量,对应的特征值自然也是$ \small a$
现在,我们把这个证明原封不动地搬运到量子力学的态空间中。
以前我们提到,经典力学量在量子力学中变成了算符,现在,我么要把算符的概念再扩充一下:作用在态矢量上的任意线性变换操作,我们都可以表示为一个算符。
比如对于旋转变换而言,我们就可以用一个线性算符$\small \hat R$ 来表示旋转,并且假设,将一个态矢量$ \small \left|\psi\right> $进行旋转变换后得到另一个态矢量$ \small \left|\psi'\right> $的过程,可以表示成这样的乘积形式:
$\small \left|\psi'\right>=\hat R\left|\psi\right> \quad{\scriptsize (式22.11)}$
(注意:态矢量是抽象的态空间中的向量,而旋转变换却是三维欧氏空间中的变换,当这个变换作用在三维欧氏空间中的向量上时,它就是前面提到的罗德里格斯公式给出的旋转矩阵 $\small \boldsymbol R $,但现在它要作用在抽象的态空间上,这会给我们带来一点困扰:作用在抽象的态空间上的旋转变换$ \small \hat R $具体是个什么样的形式?这一点我们后面会讨论)
同理,哈密顿算符作为一个类似于矩阵的东西,在旋转变换下也满足相似变换的规律:
$\small \hat H'=\hat R\hat H\hat R^{-1} \quad{\scriptsize (式22.12)}$
(这其实也是一种表象变换,是两个不同方向的球坐标表象之间的变换)
接下来,我们将前面例子中的矩阵$ \small \boldsymbol A $替换为哈密顿算符$ \small \hat H $,特征向量$ \small \boldsymbol \alpha $替换为能量本征态$ \small \left|\psi_{nlm}\right> $,然后证明就很简单了。
我们假设某个态$ \small \left|\psi_{nlm}\right> $是能量$ \small E_n $对应的本征态,即:
$\small \hat H\left|\psi_{nlm}\right>=E_n\left|\psi_{nlm}\right> \quad{\scriptsize (式22.13)}$
现在要证明的就是,旋转变换后得到的$ \small \left|\psi'_{nlm}\right>=\hat R\left|\psi_{nlm}\right> $仍然是能量$ \small E_n $对应的本征态,即:
$\small \hat H\left|\psi'_{nlm}\right>=\hat H\hat R\left|\psi_{nlm}\right>=E_n\hat R\left|\psi_{nlm}\right> \quad{\scriptsize (式22.14)}$
而我们从物理上(虽然我们还没有进行严格的数学证明)已经知道,哈密顿算符在旋转变换下具有不变性,即:
$\small \hat H=\hat R\hat H\hat R^{-1} \quad{\scriptsize (式22.15)}$
于是我们可以得到:
$\small \begin{align} \hat H\left|\psi'_{nlm}\right>&=\hat H\hat R\left|\psi_{nlm}\right>=\left(\hat R\hat H\hat R^{-1}\right)\hat R\left|\psi_{nlm}\right>=\hat R\hat H\left|\psi_{nlm}\right>\\&=\hat RE_n\left|\psi_{nlm}\right>=E_n\hat R\left|\psi_{nlm}\right>=E_n\left|\psi'_{nlm}\right> \end{align} \quad{\scriptsize (式22.16)}$
这样,我们就用代数方法证明了,$ \small \left|\psi_{nlm}\right> $经过旋转变换后得到的$ \small \left|\psi'_{nlm}\right>=\hat R\left|\psi_{nlm}\right> $仍然是相同能级对应的能量本征态。
5) 总结与预告
这节课里,我们解开了一个初学者常常会遇到的心结:
对于球对称的氢原子问题,它的本征函数解是否也具有球对称性?
然后我们分别通过微分方程和代数方法证明了:
一组本征函数在任意的空间旋转变换下得到的仍然是另一组本征函数,这就保证了本征函数在空间中取向的任意性,而这本身也就蕴含了一种球对称性(尽管由于坐标选取的特殊性导致每一组本征函数都有一个特殊取向)
而通过这两种证明路径,我们再一次看到了微分方程和线性代数之间的异曲同工之妙。
而这个结果使我们确信:即使本征函数解本身没有显示出几何直观上的球对称性,但它经过旋转变换后仍然构成了同一能级对应的本征函数,这就雨露均沾地保证了各个方向的$ \small R_{nl}(r)Y_{lm}(\theta,\varphi) $都可以作为一组本征函数(而与$ \small \theta,\varphi $的选取无关),这种“任意方向上成为本征函数的可能性”,就是一种球对称性。
这种意义下,我们其实可以认为,任意方向的$ \small z $轴以及相应的本征函数形式都只是数学选取的结果,而不具备“真实的”物理意义,因此物理上的对称性(也就是本征函数取向的可能性)并没有被破坏。
只有通过物理手段“真实地”规定了某个特殊方向,它的特殊性才会显现出来,而这个“真实地规定”的过程就必然会产生该方向上的能量扰动,同时对称性也就被破坏了。
比如后面我们将会看到,当我们给一个氢原子加上某个特定方向的外场时将会发生的事情。
不过,在进入后面的内容之前,我们其实还遗留了一个问题悬而未决:
前面我们给出了本征态或者本征函数在旋转作用下的式子:$ \small \left|\psi'_{nlm}\right>=\hat R\left|\psi_{nlm}\right> $,但这只是一个抽象的形式,而我们很好奇,作用在抽象的态空间或者具体的函数空间中上的旋转算符具体是个什么样子?(它显然不再是作用在三维向量空间中的那个罗德里格斯公式给出的矩阵)
这个问题本来是要放到将来正式讨论对称性的时候再回答,不过这里我们不妨先来一点剧透,有兴趣的同学可以先体验一下。
剧透:抽象空间中的变换形式
我们先来看看,对一个函数进行空间变换操作(这也就包括了我们本课提到的旋转变换)时,变换的算符具体是什么样子。
为了简单直观,我们先来考察一种最简单的空间变换:一元函数的平移变换,比如将一个一元函数$ \small f(x) $向右平移$ \small \Delta x $的距离,得到一个新的函数$ \small g(x) $:
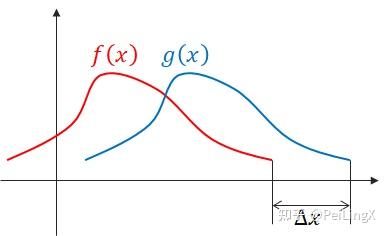
从上面的图中可以看出这样的等式关系:
$\small g(x+\Delta x)=f(x) \quad{\scriptsize (式22.17)}$
反过来就是:
$\small g(x)=f(x-\Delta x) \quad{\scriptsize (式22.18)}$
于是我们找到了平移变换的简单规则。
不过事情到此还没了结,因为这个变换还是从函数的“内部”作用在自变量上面,而我们想看到的,是一个算符从“外部”作用在$ \small f(x) $上、得到$ \small g(x) $:
$\small g=\hat Tf \quad{\scriptsize (式22.19)}$
这似乎和$ \small g(x)=f(x-\Delta x) $这种形式完全搭不上界。
但实际上物理学家们还是挺有办法的。
我们马上就来欣赏一段让人目瞪口呆但又挑不出毛病的绝(liu)妙(mang)推导[2]。
我们先将$ \small g(x)=f(x-\Delta x) $做泰勒展开:
$\small \begin{align} g(x)&=f(x-\Delta x)\\ &=\sum_{n=0}^{\infty}\left(-\Delta x\right)^n\frac{1}{n!}f^{(n)}(x)\\ &=\sum_{n=0}^{\infty}\frac{1}{n!}\left(-\Delta x\right)^n\left(\frac{\text d}{\text dx}\right)^nf(x)\\ &=\left[\sum_{n=0}^{\infty}\frac{1}{n!}\left(-\Delta x\right)^n\left(\frac{\text d}{\text dx}\right)^n\right]f(x) \end{align} \quad{\scriptsize (式22.20)}$
然后我们会发现,方括号里的东西其实可以在形式上写成这样:
$\small \sum_{n=0}^{\infty}\frac{1}{n!}\left(-\Delta x\right)^n\left(\frac{\text d}{\text dx}\right)^n=\exp\left(-\Delta x\frac{\text d}{\text dx}\right) \quad{\scriptsize (式22.21)}$
只要我们假装$ \small \frac{\text d}{\text dx} $是一个数而不是一个算子,就能克服心理上的不适应了(在量子力学中很容易“假装它是一个数”,你先猜猜这是为啥,答案过两行就公布)。
于是,我们形式上得到了对函数的平移操作的线性算符:
$\small g=\hat Tf=\exp\left(-\Delta x\frac{\text d}{\text dx}\right)f \quad{\scriptsize (式22.22)}$
如果我们想起$ \small \hat p_x=-\text i\hbar\frac{\text d}{\text dx} $,那么我们就能把微分算子假装看作一个数(动量),于是上面的线性算子就可以更自然地写成:
$\small \sum_{n=0}^{\infty}\frac{\text i}{\hbar}\frac{1}{n!}\left(-\Delta x\right)^n\left(\hat p\right)^n=\exp\left(-\frac{\text i\Delta x}{\hbar}\hat p_x\right) \quad{\scriptsize (式22.23)}$
相应地,我们就能将平移变换写成:
$\small g=\hat Tf=\exp\left(-\frac{\text i\Delta x}{\hbar}\hat p_x\right)f \quad{\scriptsize (式22.24)}$
这就得到了我们所期待的、一个线性算子“从外部”作用在函数上的形式。
而对于转动变换而言,我们也有相同的思路,只是这个推导更加复杂,但好在我们是物理爱好者,有时候可以靠物理直觉来猜一个结果。
前面我们看到,空间平移的算子中包含了对位置的求导,而这个求导算子又和动量算符产生了联系,因此我们最终将平移变换表示成了动量算符的指数函数形式(还记得我们在第17课中曾经提到过的一个名词吗:动量算符是平移变换的“生成元(Generator)”,现在是不是对这个词有点感觉了?)。
那么,类比之下,空间旋转是不是也会和某个算符产生联系呢?这个其实也很容易猜到,与空间旋转相联系的,应该就是角动量算符,于是函数的空间旋转变换就可以在形式上写成:
$\small g=\hat Rf=\exp\left(-\frac{\text i\theta}{\hbar}\boldsymbol n\cdot\hat {\boldsymbol J}\right)f \quad{\scriptsize (式22.25)}$
(其中$ \small \boldsymbol n $是旋转轴对应的单位向量,它和角动量算符的内积就是$ \small \boldsymbol n\cdot\hat{\boldsymbol J}=n_x\hat{J}_x+n_y\hat{J}_y+n_z\hat{J}_z )$
如果写成具体的函数形式,一个函数$ \small f(\boldsymbol x) $在空间旋转算符的作用下,就会生成这样的变换:
$\small \hat Rf=f(\boldsymbol R^{-1}\boldsymbol x) \quad{\scriptsize (式22.26)}$
(注意:自变量是加粗的向量符号,即位矢$ \small \boldsymbol x=(x,y,z)^T )$
其中:$ \small \boldsymbol R $就是由罗德里格斯公式给出的旋转矩阵(同学们可以思考一下为什么括号里是它的逆矩阵)。
到此,我们就完成了作用在函数上的空间变换算符的引入,这些算符将在未来引导我们去游览一个抽象又迷人的对称世界。
顺便再说一句:我们在这里也看到,同样的空间变换算符,作用在不同空间上会有不同的形式,我们现在看到了它作用在欧氏空间和函数空间上的样子,以后我们还会看到它作用在其他奇怪的空间上,现在有了这个心理准备,我们将来看到其他奇怪的变换的时候,就不会觉得突兀了。
参考
- 这个链接有绘制球谐函数的MATLAB代码: https://blog.csdn.net/weixin_42524013/article/details/115846833
- 张永德, 《量子力学(第四版)》, P157~158
编辑于 2022-07-13 14:39