
PeiLingX
物理学等 2 个话题下的优秀答主
本文是深度科普系列《从线性代数到量子力学》第19课。
本系列及本专栏其他文章,建议收藏目录:
0) 开篇语
⚠ 枯燥预警
本课内容主要讨论一些算符之间的对易关系,有点抽象甚至枯燥。
但请同学们一定要忍住枯燥感和不明所以的疑惑读下去,因为下节课我们就会看到这些结论的强大作用;并且,在讨论过程中,我们还会看到这些对易关系背后蕴含的非常重要也非常有意思的物理图景。
上节课中,我们介绍了球坐标形式的薛定谔方程,并且讨论了它的物理意义。在这个过程中,我们导出了与球对称模型相配的角动量以及它的算符。
这节课我们要为求解氢原子薛定谔方程做最后的准备:讨论球对称模型中各个算符之间的对易关系以及相应的物理图景,这将有助于我们理解氢原子问题的整个求解过程。
我们在第14课中简单介绍过对易关系的概念,当时我们提到,当两个算符相互对易时,我们可以从三个层面去理解:
- 抽象层面:两个算符可交换作用顺序(就像某些交换乘法顺序的矩阵一样),对易子等于$0$:
$\small \left[\hat A,\hat B\right]=\hat A\hat B-\hat B\hat A=0 \quad{\scriptsize (式19.1)}$
- 代数层面:两个算符具有完备的共同本征态组(所谓完备,可以简单理解为这些共同本征态组可以构成态空间的全部基底);
- 物理层面:两个算符对应的力学量可以同时确定(因为具有共同本征态意味着不同的本征矢之间没有相互投影,也就意味着两者之间不会有不确定性关系)。
反之,如果两个算符不对易,则将上述三条论述都加上一个“不”就行了。
而在我们后面的讨论中,这三层意义都会有大作用,具体来说就是:
- 算符对易的抽象关系将方便我们快速进行一些计算和推导;
- 它的代数意义将帮助我们理解氢原子薛定谔方程的求解过程;
- 它的物理意义又将帮助我们理解氢原子薛定谔方程解的物理图景。
这就是为什么我们要专门用一节课时间,来讨论球坐标系对应的各算符之间的对易关系。
接下来,我们先来简单说明一下,这节课要讨论哪些对易关系。
1) 我们关注哪些关系
上节课我们知道,球坐标表象下,哈密顿算符中的动能项可以分解成径向和角向两部分。
基于这个想法,我们不妨先把上节课讨论过的算符都拉出来,并且按哈密顿、径向、角向,分组拍个全家福:
$\small \begin{cases} {\scriptsize 哈密顿:}&\hat H\\ {\scriptsize 径向组:}&\hat p_r &\hat p_r^2&\hat V\\ {\scriptsize 角向组:}&\hat L_x&\hat L_y&\hat L_z&\hat L^2_x&\hat L^2_y&\hat L^2_z&\hat L^2 \end{cases}$
这节课我们就要来讨论各组之间以及各组内部的对易关系。
这里最明显的是径向组内部的对易关系:$ \small \hat p_r,\hat p_r^2 $之间相互对易自不必说,而$ \small \hat V $和$ \small \hat p_r $之间显然是不对易的,因为一个粒子具有确定的径向动量分量时,矢径会变得不确定,而$ \small \hat V $是矢径$ \small r $的函数,自然也就没有确定的势能了。
不过径向组各算符之间的对易关系并不是我们关心的,我们更关心的是这些对易关系:
径向组与角向组各算符之间的对易关系 (诸侯对诸侯)
角向组内部各算符之间的对易关系 (诸侯国内部)
角向组成员与哈密顿算符之间的对易关系 (诸侯对朝廷)
其中尤为重要的是第三组关系。因为在氢原子薛定谔方程的求解过程中,我们会用到所谓的分离变量法,而下节课我们会看到,这个方法的线性代数实质,其实是要在角向组中找到一些与哈密顿算符对易的算符,然后利用它们具有共同本征态组的特性逐步求解。
另外,在正式讨论之前,我们先给出四个关于对易子的恒等式备着,后面推导时会用上:
$\small \begin{cases} [\hat A,\hat B]=-[\hat B,\hat A]&{\scriptsize (式19.2)}\\ \left[k\hat A,\hat B\right]=\left[\hat A,k\hat B\right]=k\left[\hat A,\hat B\right]&{\scriptsize (式19.3)}\\ \left[\hat A+\hat B,\hat C\right]=\left[\hat A,\hat C\right]+\left[\hat B,\hat C\right]&{\scriptsize (式19.4)}\\ \left[\hat A\hat B,\hat C\right]=\hat A\left[\hat B,\hat C\right]+\left[\hat A,\hat C\right]\hat B&{\scriptsize (式19.5)} \end{cases}$
(式19.3中$ \small k $是任意常数)
(注:这些恒等式都可以通过对易子的定义推导出来,这里省略推导过程,有兴趣的同学可以自己动笔算一算)
下面我们就从简单的开始讨论。
2) 径向组 v.s. 角向组
这个其实也比较简单,从我们上节课给出的径向和角向各算符的球坐标表象就能看出来:
$\small \begin{cases} \hat V=V(r)\\ \hat p_r=-\text i\hbar\left(\frac{\partial }{\partial r}+\frac{1}{r}\right)\\ \hat L_x=\text i\hbar\left(\sin\varphi\frac{\partial }{\partial \theta}+\cot\theta\cos\varphi\frac{\partial }{\partial \varphi}\right)\\ \hat L_y=\text i\hbar\left(-\cos\varphi\frac{\partial }{\partial \theta}+\cot\theta\sin\varphi\frac{\partial }{\partial \varphi}\right)\\ \hat L_z=-\text i\hbar\frac{\partial }{\partial \varphi}\ \end{cases} \quad{\scriptsize (式19.6)}$
我们看到,两个径向算符只与$ \small r $有关,而三个角动量算符的分量只和$ \small \theta,\varphi $有关,那么径向算符和角项算符求导和相乘时就可以交换顺序。
我们以$ \small \hat p_r $和$ \small \hat L_z $为例,假如我们让它们同时作用到一个态矢量$ \small \left|\psi\right> $上面,那么我们将会得到:
$\small \begin{align} \hat p_r\hat L_z\left|\psi\right>&=-\hbar^2\left(\frac{\partial }{\partial r}+\frac{1}{r}\right)\frac{\partial }{\partial \varphi}\psi\\ &=-\hbar^2\left(\frac{\partial^2 \psi}{\partial r\partial \varphi}+\frac{1}{r}\frac{\partial \psi}{\partial \varphi}\right)\ \end{align} \quad{\scriptsize (式19.7)}$
(注意:这里算符作用在$ \small \left|\psi\right> $并不具有实际的物理意义,而只是帮助我们计算推导而已)
而交换作用顺序后:
$\small \begin{align} \hat L_z\hat p_r\left|\psi\right>&=-\hbar^2\frac{\partial }{\partial \varphi}\left(\frac{\partial }{\partial r}+\frac{1}{r}\right)\psi\ &=-\hbar^2\left(\frac{\partial^2 \psi}{\partial \varphi\partial r}+\frac{\partial }{\partial \varphi}\frac{\psi}{r}\right)\ \end{align} \quad{\scriptsize (式19.8)}$
对于等式右边括号中第一项,可以交换求导顺序变成$ \scriptsize \frac{\partial^2 \psi}{\partial r\partial \varphi} $,对于第二项,由于$ \small r $与$ \small \varphi $无关,因此对$ \small \varphi $求导时可以将$ \scriptsize \frac{1}{r} $作为常数因子提取出来,所以最终的结果:
$\small \begin{align} \hat L_z\hat p_r\left|\psi\right>&=-\hbar^2\left(\frac{\partial^2 \psi}{\partial r\partial \varphi}+\frac{1}{r}\frac{\partial \psi}{\partial \varphi}\right)\ &=\hat p_r\hat L_z\left|\psi\right> \end{align} \quad{\scriptsize (式19.9)}$
其他径向算符和角动量算符之间的对易关系也可以以此类推。
而这些对易关系的物理意义也不难理解:
球坐标下,径向和角向相互正交,其实可以形成一个局部直角坐标系,而我们在第17课中看到,三个坐标方向之间的力学量是相互独立的,这就意味着一个径向算符和一个角向算符可以同时确定。
而径向算符和角向算符的对易关系中,我们最需要的是这两对:
$\small \begin{cases} \left[\hat p_r^2,\hat L^2\right]=0\\\left[\hat V,\hat L^2\right]=0 \end{cases} \quad{\scriptsize (式19.10)}$
利用它们,我们可以得出本课的第一个重要关系:哈密顿算符$ \small \hat H $和角动量平方算符$ \small \hat L^2 $的对易关系。
3) 哈密顿 v.s. 角动量平方
利用前面给出的恒等式19.3,我们可以知道:
$\small \begin{align} \left[\frac{\hat p_r^2}{2m_e},\frac{\hat L^2}{2m_er^2}\right]&=\frac{1}{2m_e}\left[\hat p_r^2,\frac{\hat L^2}{2m_er^2}\right]\\ &=\frac{1}{2m_e}\frac{1}{2m_er^2}\left[\hat p_r^2,\hat L^2\right]\\ &=0 \end{align} \quad{\scriptsize (式19.11)}$
注:这一步推导还有点问题,待更正……
再利用前面给出的恒等式19.4,我们又可以知道:
$\small \left[\frac{\hat p_r^2}{2m_e}+\hat V,\frac{\hat L^2}{2m_er^2}\right]= \left[\frac{\hat p_r^2}{2m_e},\frac{\hat L^2}{2m_er^2}\right]+\left[\hat V,\frac{\hat L^2}{2m_er^2}\right]=0 \quad{\scriptsize (式19.12)}$
而考虑到:
$\small \hat H=\frac{\hat p_r^2}{2m_e}+\hat V+\frac{\hat L^2}{2m_er^2} \quad{\scriptsize (式19.13)}$
则有:
$\small \begin{align} \left[\hat H,\frac{\hat L^2}{2m_er^2}\right]&=\left[\frac{\hat p_r^2}{2m_e}+\hat V+\frac{\hat L^2}{2m_er^2},\frac{\hat L^2}{2m_er^2}\right]\\ &= \left[\frac{\hat p_r^2}{2m_e}+\hat V,\frac{\hat L^2}{2m_er^2}\right]+\left[\frac{\hat L^2}{2m_er^2},\frac{\hat L^2}{2m_er^2}\right]\\ &=0+0\\ &=0 \end{align} \quad{\scriptsize (式19.14)}$
这意味着,粒子在球对称势场中的总能量与角动量贡献的动能是可以同时确定的。
而整体的物理图景就是:
径向的能量(动能加势能)和角向的动能之间相互独立,可以同时具有确定值,而它们求和后得到的总能量自然也就确定了,并且,两者的共同本征态也是总能量的共同本征态,写成本征值关系就是:
$\small \begin{align} \hat H\left|E\right>&=\left[\left(\frac{\hat p_r^2}{2m_e}+\hat V\right)+\frac{\hat L^2}{2m_e\hat r^2}\right]\left|E\right>\\ &=\left(E_r+E_L\right)\left|E\right> \end{align} \quad{\scriptsize (式19.15)}$
这里顺便说一句,关于$ \small \hat H $与$ \small \hat L^2 $的对易关系,更多时候,我们省略里面的常系数,直接写成:
$\small \begin{align} \left[\hat H,\hat L^2\right]&=0 \end{align} \quad{\scriptsize (式19.16)}$
请记住这个关系,下节课有重要作用。
接下来,我们要来看看角向组内部各算符之间的对易关系。
4) 角向组内部的对易关系
我们即将讨论的角向组算符内部的对易关系,是这节课的重头戏,其中涉及的计算会稍微复杂一些,但由此得出的一些结论以及它们的物理意义,却是非常有意思的。
我们先从最基本的说起,看看三个角动量算符$ \small \hat L_x,\hat L_y,\hat L_z $之间的对易关系。
我们可以有两种办法来得出它们。
一是直接在球坐标表象下计算,这个计算其实也不复杂,就是一些复合求导运算而已,这里不展开,作为课后练习留给同学们吧(见文末附录1)。
另外一种是到三个角动量分量算符的原始定义中去寻找:
$\small \begin{cases} \hat L_x=\hat y\hat p_z-\hat z\hat p_y\\ \hat L_y=\hat z\hat p_x-\hat x\hat p_z\\ \hat L_z=\hat x\hat p_y-\hat y\hat p_x\ \end{cases} \quad{\scriptsize (式18.11)}$
里面涉及到的算符,都是直角坐标系中坐标和动量算符,它们的对易关系我们已经相对比较熟悉了,因此我们可以利用直角坐标和动量的对易关系,来得到角动量算符的对易关系。
具体的推导我们放到文末附录$2$当中,同学们有时间的时候一定要去仔细咀嚼一下,这有助于我们熟悉如何直接运用对易关系进行抽象运算(而不是每次都放到坐标表象下去暴力算)。
现在我们直接给出结论:
$\small \begin{cases} \left[\hat L_x,\hat L_y\right]=\text i\hbar\hat L_z\\ \left[\hat L_y,\hat L_z\right]=\text i\hbar\hat L_x\\ \left[\hat L_z,\hat L_x\right]=\text i\hbar\hat L_y \end{cases} \quad{\scriptsize (式19.17)}$
这首先意味着,三个方向的角动量算符是相互不对易的,这是角动量和动量的不同之处。
关于这一点,我们仍然可以从数学推导、物理意义、几何意义三个角度去理解。
当然,对于第一个角度,鉴于我们刚才已经简单介绍过推导思路,这里就不用再提了;
而第三个角度、几何的角度,我们也照例先蜻蜓点水地提两句,把详细讨论放到以后的课程里:
角动量算符可以看成三维转动群(又叫特殊正交群,记作$ \small \text{SO(3)} )$的生成元,而三维转动是不能交换顺序的(有兴趣的同学可以拿个骰子来研究一下),这就对应了角动量算符的不可交换性。
现在我们来重点说说第二个角度:物理意义的角度。
我们不妨先假设一个粒子同时具有确定的角动量$ \small L_x,L_y,L_z $,那么这就意味着,我们可以通过合适的坐标转动,使得粒子绕核旋转的旋转轴与新的$ \small z' $轴重合,于是此时粒子的角动量为:$\small \boldsymbol L'=0\vec{\text i}+0\vec{\text j}+L'_z\vec{\text k}$
现在我们来想象它的经典物理图像:
$\small L'_x=L'_y=0$ 意味着粒子会在 $\small x'y'$ 平面上做平面圆周运动(或其他轨迹的平面运动),这就意味着,粒子 $\small z'$ 方向的坐标和动量分量都是0,也就是都具有确定值,这显然与 $\small \hat z',\hat p'_z $不对易的结论矛盾。
换句话说,当粒子的某个角动量分量、比如 $\small L_z$ 具有确定值时,直角坐标和动量的不可对易性会导致它无法像经典粒子一样被局限在某个平面、比如 $\small xy$ 平面上运动,这就导致了粒子会产生不确定的 $\small L_x,L_y$ 分量。
体现在算符上,就是三个角动量分量算符的不可对易性了。
现在我们继续来看看角向组内部的其他重要的对易关系。
虽然$ \small \hat L_x,\hat L_y,\hat L_z $相互不对易、不能同时确定,但是接下来我们会看到,将它们的平方经过某些组合后,我们会得到一对相互对易的关系,而且这个关系背后的物理意义更加奇妙。
回忆起上节课,我们将球坐标薛定谔方程写成了抽象的狄拉克符号形式:
$\small \begin{align} E\left|\psi\right>&=\left[\frac{1}{2m_e}\hat p_r^2+\frac{1}{2m_er^2}\left(\hat L_x^2+\hat L_y^2\right)+\frac{1}{2m_er^2}\hat L_z^2\right]\left|\psi\right>+\hat V\left|\psi\right> \end{align} \quad{\scriptsize (式18.30)}$
在这当中,我们将角动量贡献的动能拆成了两部分:$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z^2$
现在我们要来看看这两部分算符的对易关系,并且讨论相应的物理意义,这是非常有意思的一件事情。
这里,我们先将问题简化一下,先找到$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z $的对易关系:
$\small \begin{align} \left[\hat L_x^2+\hat L_y^2,\hat L_z\right]&=\left[\hat L_x^2,\hat L_z\right]+\left[\hat L_y^2,\hat L_z\right]\\ &=\hat L_x\left[\hat L_x,\hat L_z\right]+\left[\hat L_x,\hat L_z\right]\hat L_x+\hat L_y\left[\hat L_y,\hat L_z\right]+\left[\hat L_y,\hat L_z\right]\hat L_y\\ &=-\text i\hbar\hat L_x\hat L_y-\text i\hbar\hat L_y\hat L_x+\text i \hbar\hat L_y\hat L_x+\text i\hbar\hat L_x\hat L_y\\ &=0 \end{align} \quad{\scriptsize (式19.18)}$
(第一个等号和第二个等号分别用到了恒等19.4和19.5)
接下来,$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z^2 $的对易关系也就很容易得出来:
$\small \begin{align} \left[\hat L_x^2+\hat L_y^2,\hat L_z^2\right]&=-\left[\hat L_z^2,\hat L_x^2+\hat L_y^2\right]\\ &=-\hat L_z\left[\hat L_z,\hat L_x^2+\hat L_y^2\right]-\left[\hat L_z,\hat L_x^2+\hat L_y^2\right]\hat L_z\\ &=-\hat L_z 0-0\hat L_z\\ &=0-0\\ &=0 \end{align} \quad{\scriptsize (式19.19)}$
于是我们看到,当$ \small \hat L_x^2,\hat L_y^2 $合为一体的时候,它们与$ \small \hat L_z $之间的不确定性突然消失了,一切又变得确定起来。
接下来,我们就来讨论这个对易关系的物理意义,这是个很有意思的图景:
前面我们知道,当$ \small L_z $确定时,$ \small L_x,L_y $单独看都不再是一个确定的值,而在对这个关系的物理意义的讨论中我们还知道,这意味着不存在一个确定的平面,使得粒子在这个平面上做角动量为$ \small L_z $的圆周运动。
换句话说,如果将粒子的角动量矢量看成一个垂直于圆周运动所在平面的箭头的话,那么这种不确定性就意味着,这个箭头没有确定的方向。
但是,有意思的是,$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z^2 $的对易关系告诉我们,当$ \small L_z $处于确定状态时,这个箭头的方向也并不是完全随机的,而是会局限在一个以$ \small z $为中心轴的圆锥面上取值。
这个圆锥面的高为$ \small L_z $、底面半径为$ \small \sqrt{L_x^2+L_y^2} $,就像下面这张图一样:
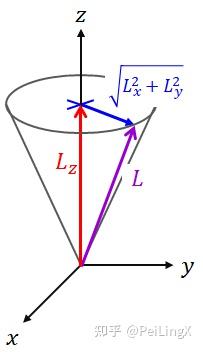
请把这幅图刻到脑回路里,因为它对我们后面直观理解氢原子问题的角向解非常有帮助。
现在,我们来完成本节课的最后一件事情:
利用$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z $的对易关系,我们很容易导出、$ \small \hat L^2,\hat L_z $也是对易的:
$\small \begin{align} \left[\hat L^2,\hat L_z\right]&=\left[\hat L_x^2+\hat L_y^2+\hat L_z^2,\hat L_z\right]\\ &=\left[\hat L_x^2+\hat L_y^2,\hat L_z\right]+\left[\hat L_z^2,\hat L_z\right]\\ &=0+0\\ &=0 \end{align} \quad{\scriptsize (式19.20)}$
这意味着$ \small \hat L^2 $与$ \small \hat L_z $也具有完备的共同本征态组,这个关系也将在我们求解氢原子薛定谔方程的过程中发挥关键作用。
5) 总结与预告
经过非常辛苦的一节课,我们梳理了球对称问题中各算符之间的几个重要对易关系,并简单讨论了它们的物理图景。
我们看到,如果将算符按照哈密顿、径向、角向分成三组,那么它们将有下面的关系:
- 径向组与角向组:
径向组的任意算符与角向组的任意算符相互对易,这意味着径向的动量、势能与角向的各个角动量(以及它们的平方)相互独立,互不影响。
- 角向组内部:
首先,我们看到,三个角动量算符$ \small \hat L_x,\hat L_y,\hat L_z $相互不对易,这意味着三个角动量不能同时具有确定的值,或者说角动量矢量没有确定的方向。
但同时,我们又得出了$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z^2 $的对易关系:
$\small \begin{align} \left[\hat L_x^2+\hat L_y^2,\hat L_z^2\right]&=0 \end{align} \quad{\scriptsize (式19.18)}$
这意味着,当$ \small \hat L_z $处于它的本征态、即$ \small L_z $具有确定值时,虽然$ \small L_x,L_y $单独看都不确定,但它们的平方和$ \small L_x^2+L_y^2 $是确定的,此时,角动量矢量的可能取值就形成了一个高为$ \small L_z $、底面半径为$ \small \sqrt{L_x^2+L_y^2} $的圆锥面:
根据这个,我们还顺便得到了角动量平方与$ \small L_z $的对易关系:
$\small \left[\hat L^2,\hat L_z\right]=0 \quad{\scriptsize (式19.20)}$
而除了上述关系以外,我们还得出了与哈密顿算符有关的重要对易关系。
- 哈密顿与各算符:
在推导过程中,我们利用哈密顿算符的构成(忽略各项系数):
$\small \begin{align} \hat H&=\left(\hat V+\hat p_r^2\right)+\hat L^2 \end{align} \quad{\scriptsize (式19.21)}$
以及$ \small \hat V+\hat p_r^2 $和$ \small \hat L^2 $的对易关系,给出了哈密顿算符与角动量平方的对易关系:
$\small \left[\hat H,\hat L^2\right]=0 \quad{\scriptsize (式19.16)}$
此外,如果考虑到哈密顿算符可以进一步做这样的分解(忽略各项系数):
$\small \begin{align} \hat H&=\left(\hat V+\hat p_r^2\right)+\hat L^2\ &=\left(\hat V+\hat p_r^2\right)+\left[\left(\hat L_x^2+\hat L_y^2\right)+\hat L_z^2\right] \end{align} \quad{\scriptsize (式19.22)}$
并结合$ \small \hat L_x^2+\hat L_y^2 $和$ \small \hat L_z $的对易关系,我们还能得出:
$\small \left[\hat H,\hat L_z\right]=0 \quad{\scriptsize (式19.23)}$
这两组对易关系意味着,哈密顿算符$ \small \hat H $的本征态同时也是$ \small \hat L^2,\hat L_z $的本征态,这一点将是我们解决那个看起来很复杂的氢原子薛定谔方程的关键。
现在,最关键的钥匙已经拿到手里了,下节课,我们就要来正式求解氢原子薛定谔方程。
附录1:一道简单的课后练习
请利用角动量算符的球坐标表象:
$ \small \begin{cases} \hat L_x=\text i\hbar\left(\sin\varphi\frac{\partial }{\partial \theta}+\cot\theta\cos\varphi\frac{\partial }{\partial \varphi}\right)\\ \hat L_y=\text i\hbar\left(-\cos\varphi\frac{\partial }{\partial \theta}+\cot\theta\sin\varphi\frac{\partial }{\partial \varphi}\right)\\ \hat L_z=-\text i\hbar\frac{\partial }{\partial \varphi}\ \end{cases}$
推导角动量算符之间的对易关系:
$\small \begin{cases} \left[\hat L_x,\hat L_y\right]=\text i\hbar\hat L_z\\ \left[\hat L_y,\hat L_z\right]=\text i\hbar\hat L_x\\ \left[\hat L_z,\hat L_x\right]=\text i\hbar\hat L_y \end{cases} \quad{\scriptsize (式19.24)}$
附录2:角动量对易关系的推导
现在我们回头再梳理一下这些关系。
第17课中我们曾经提到,三个坐标分量是可以同时确定,而这就意味着它们的算符相互对易。
我们用$ \small x_1,x_2,x_3 $分别代替$ \small x,y,z $,这个对易关系就可以写成:
$\small \left[\hat x_i,\hat x_j\right]=0\quad (i,j=1,2,3) \quad{\scriptsize (式19.25)}$
同样,三个动量分量的算符也相互对易,用$ \small p_1,p_2,p_3 $分别代替$ \small p_x,p_y,p_z $,就是:
$\small \left[\hat p_i,\hat p_j\right]=0\quad (i,j=1,2,3) \quad{\scriptsize (式19.26)}$
现在我们来看坐标和动量之间的对易关系。
在第14课中,我们曾经提到,同一方向的坐标$ \small x $和动量$ \small p_x $是不对易的,它们的对易子为:
$\small \left[\hat x,\hat p_x\right]=\text i\hbar\hat I \quad{\scriptsize (式19.27)}$
(其中 $\small \hat I $是单位算符,即它作用在任何态矢量上,得到的仍然是原来的态矢量,就像线性代数中的单位矩阵一样)
而实际计算中,我们通常省略$ \small \hat I $,直接写成:
$\small \left[\hat x,\hat p_x\right]=\text i\hbar \quad{\scriptsize (式19.28)}$
我们可以在坐标表象下做个简单验证。
首先,我们还是将它们作用在一个态矢量上:
$\small \begin{align} \left[\hat x,\hat p_x\right]\left|\psi\right>&=\hat x\hat p_x\left|\psi\right>-\hat p_x\hat x\left|\psi\right>\\ &=-x\text i\hbar\frac{\partial \psi}{\partial x}+\text i\hbar\frac{\partial (x\psi)}{\partial x}\\ &=\text i\hbar\left[-x\frac{\partial \psi}{\partial x}+\left(\psi\frac{\partial x}{\partial x}+x\frac{\partial \psi}{\partial x}\right)\right]\\ &=\text i\hbar \psi\\ &=\text i\hbar \left|\psi\right> \end{align} \quad{\scriptsize (式19.29)}$
由于这对任意$ \small \left|\psi\right> $都成立,因此我们抽离出:
$\small \left[\hat x,\hat p_x\right]=\text i\hbar \quad{\scriptsize (式19.30)}$
现在,我们到了三维空间中,如果考察同一个坐标方向上的坐标$ \small \hat x_i $和动量$ \small \hat p_i $之间的对易子,那么它们显然也满足上面的关系。
但是现在有个问题来了:两个不同坐标方向的坐标和动量之间的对易关系如何呢?
这个其实也很简单,只要我们意识到这个关系:
$\small \frac{\partial }{\partial x}\left(yf(x)\right)=y\frac{\partial f}{\partial x} \quad{\scriptsize (式19.31)}$
就能很快推导出结论(同学们可以在坐标表象下自己算一下):
$\small \left[\hat x_i,\hat p_j\right]=0\quad i\neq j \quad{\scriptsize (式19.32)}$
也就是说,一个粒子在某个坐标方向上的位置和另一个坐标方向上的动量可以同时确定。
这个关系的物理图景其实也可以想象:
考虑我们在第17课里提到的三维无限深势阱模型,如果我们将$ \small x $方向上的势阱宽度拉到无限大,而将另外两个方向的势阱宽度压缩到趋近于$0$,那么我们就能得到一个$ \small x $方向上不受束缚的“准自由粒子”,它将具有确定的$ \small x $方向的动量$ \small p_x $和$ \small y,z $方向的坐标。
而我们将相同方向和不同方向两种情况的坐标$-$动量对易关系总结成一个式子就是:
$\small \left[\hat x_i,\hat p_j\right]=\text i\hbar \delta_{ij} =\begin{cases}\text i\hbar &i=j\\ 0&i\neq j\end{cases} \quad{\scriptsize (式19.33)}$
最后,我们再把坐标和动量算符所有的对易关系都汇总到一起:
$\small \begin{cases} \left[\hat x_i,\hat x_j\right]=\left[\hat p_i,\hat p_j\right]=0\\ \left[\hat x_i,\hat p_j\right]=\text i\hbar \delta_{ij} \end{cases} \quad{\scriptsize (式19.34)}$
利用这些关系,我们就能计算角动量算符的对易关系了。
我们以$ \small \left[\hat L_x,\hat L_y\right] $为例来感受一下:
$\small \begin{align} \left[\hat L_x,\hat L_y\right]&=\left(\hat y\hat p_z-\hat z\hat p_y\right)\left(\hat z\hat p_x-\hat x\hat p_z\right)-\left(\hat z\hat p_x-\hat x\hat p_z\right)\left(\hat y\hat p_z-\hat z\hat p_y\right)\\ &=\hat y\hat p_z\hat z\hat p_x-\hat z\hat p_y\hat z\hat p_x-\hat y\hat p_z\hat x\hat p_z+\hat z\hat p_y\hat x\hat p_z\\ &\quad\quad-\hat z\hat p_x\hat y\hat p_z+\hat x\hat p_z\hat y\hat p_z+\hat z\hat p_x\hat z\hat p_y-\hat x\hat p_z\hat z\hat p_y \end{align} \quad{\scriptsize (式19.35)}$
利用不同坐标之间算符相互对易的特点,我们可以将不同坐标的算符任意交换顺序,而只保留相同坐标的算符顺序,比如,我们可以将$ \small \hat y\hat p_z\hat z\hat p_x $经过交换变成$ \small \hat y\hat p_x\hat p_z\hat z $,交换了$ \small \hat y,\hat p_x $的位置,但保持$ \small \hat p_z\hat z $的顺序不变。
这样,我们可以将式19.35右边各项经过交换后再往下推导:
$\small \begin{align} \left[\hat L_x,\hat L_y\right]&=\hat y\hat p_x\hat p_z\hat z-\hat p_x\hat p_y\hat z^2-\hat x\hat y\hat p_z^2+\hat x\hat p_y\hat z\hat p_z\\ &\quad\quad-\hat y\hat p_x\hat z\hat p_z+\hat x\hat y\hat p_z^2+\hat p_x\hat p_y\hat z^2-\hat x\hat p_y\hat p_z\hat z\\ &=\hat y\hat p_x\hat p_z\hat z+\hat x\hat p_y\hat z\hat p_z-\hat y\hat p_x\hat z\hat p_z-\hat x\hat p_y\hat p_z\hat z\\ &=-\hat y\hat p_x\left[\hat z,\hat p_z\right]+\hat x\hat p_y\left[\hat z,\hat p_z\right]\\ &=-\text i\hbar\hat y\hat p_x+\text i\hbar\hat x\hat p_y\\ &= \text i\hbar\hat L_z \end{align} \quad{\scriptsize (式19.36)}$
这就证明了我们给出的结论。
另外两对角动量分量的对易关系以此类推。
如果同学们今后还要系统性地学习量子力学,这些计算都是基本功。
编辑于 2023-10-18 14:06・IP 属地四川